
水下照明系统是由一个或多个电视,视频和静态摄像头组成的观察系统驱动的,对他们之间的关系的理解是至关重要的。
当在水下进行远距离的光学观察时,吸收和散射都会影响其效果。溶解物质增加其吸收,悬浮物质增加其散射。散射是更麻烦的,不仅要从有用光里移出光束,还会增加背景照明光。通过使用更强的光来补偿光的吸收损失,但是在某些情况下,由于反向散射的增加,额外的光线可能会使系统效果降低。在这种情况下就像在雾里驾驶时使用高波束前灯会导致比低波束前灯更差的视线一样。
在被拍摄的物体和摄像头之间的水体里保持没有多余的光线可以减少散射引起的背景照明的影响。这可以通过分离灯光和摄像头来实现,在特别浑浊的水环境下使用2个或3个低功率的照明灯来代替1个高功率的照明灯也能改善这个情况。
在海水中摄像头可以清晰的拍摄几米远的物体,但是不像在空气中,即使是在最好的海水中,在5-10米的近距离范围内清晰度也会急剧下降。在一些靠海岸水域背向散射的影响会减少可见度或者拍摄距离只有1-2米,把光源远离摄像头的前面会改善整个情况。
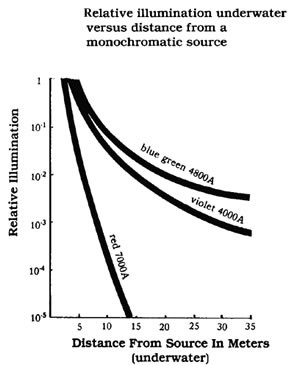
除了由于吸收而导致的光强度降低的基本效果外,由于实际的吸收和颜色之间的函数关系,这个问题进一步复杂化了。在水中红光被吸收的速度是蓝绿光的6倍,这就是为什么长距离的水下拍照时通常使用蓝色色调而没有其他太多颜色。下面的图表显示了红色光(7000A)与蓝绿和紫色光相比的严重衰减。
即使是最干净的表面水,在4-5米深的环境中,红光几乎是不存在的。这种情况下在现在的水下摄影中得到了极大的改善,通过使用强大的闪光灯和相机来获得更多的“红色”光线,从而产生一幅更加色彩平衡的照片。
一盏灯的颜色温度是用开尔文度(K)来表示的。大多数水下灯光都使用钨卤灯,颜色温度为2800-3400开尔文度。在这个颜色温度下的主要波长是红色。如上面讨论,红色在水里会被快速吸收,减少了光的穿透性,也降低了真正的彩色成像的范围。这对于某些ROV应用来说是没问题的,比如只需要近距离的拍摄。更高温度的灯光也可以减少背向散射,特别是在长距离范围时,因为近散射光的比率(更多的红色)相对于较远的物体所产生的光的比值更低。
对于专业的视频成像应用,如DSPL的灯光能提供非常好的照明. DSPL’s 400 W HMI SeaArc2 (如下图) 是一种电弧放电灯,发光的电弧在稠密的蒸汽气氛中燃烧,包括水银和稀土卤化物。HMIs有一个“日光”颜色的温度在5600开尔文度左右,类似于自然的阳光。由HMIs产生的光具有较高的颜色温度(较长的光波长),从而进一步渗透,在广阔的区域提供更大的真彩色照片,使他们成为拍摄沉船的理想照明源。

HMIs也比白炽灯更有效,每瓦产生3-4倍的流明。由于没有灯丝可以打破,它们对震动和振动的敏感度较低。一个单独的电子镇流器调节电源输入。主要用于纪录片探险(如电影泰坦尼克),HMI灯在一般的ROV市场中获得了认可。
对于HMI灯的补充是金属卤化物高强度放电(HID)灯。HID灯是弧光灯,就像HMIs一样,但使用的是磁性压舱物而不是电子镇流器。HID灯也可以被掺杂以产生不同颜色的光谱。DSPL提供了日光、碘化(TI)和紫外线的选择。日光灯管产生的颜色温度与HMIs相同,5000-6000开尔文度.TI灯产生的绿光,具有最好的水下穿透性,是远程驾驶的最佳灯。与紫外线滤光片一起使用的紫外线(UV)灯对于发现石油泄漏是很有用的。HID灯也被用于需要长寿命灯光的应用环境,或者是在连续不断地使用灯的情况下。深拖拍照测量,长时间的ROV和旅游潜艇等应用环境。







评论