
水下机器人是由多个高度关联的子系统构成,当各个系统能高效协调工作时,将具备强大的水下作业能力。水下潜器的特点是多元化的,没有唯一的方案,那设计过程必然是一个迭代。由于各个子系统之间高度依赖的关系,水下机器人系统的性能会是设计和操作特性平衡的折衷。这些子系统可以大致分为:
○ 水下潜器本体
○ 工具和传感器
○ 控制显示单元
○ 供电分配单元
○ 脐带缆
○ 布放系统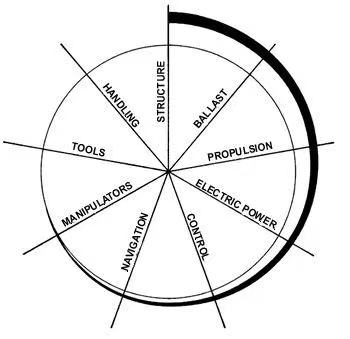
为了方便设计水下潜器还可以细分为多个子系统。这些子系统之间的相互关系用设计螺旋循环的方式给大家呈现在上面的图表里。比如:ROV领航员渴望增加ROV的速度来应对某些特殊地理区域的工作,增加速度则需要额外的电能,并且需要改变推进系统。除此之外,配置,结构,重量,控制系统,脐带缆尺寸,脐带缆管理系统,绞车,布放系统和电源都将受到影响。
很明显地,所有这些子系统和组成都将受到一个看起来很简单且不会降低系统性能的改进要求的影响。因此,设计者,用户或者操作者需要清楚的认识到ROV系统灵敏性的改变和仔细考虑这些期望的改变带来的严重后果, 而且这些改变会出现在一些微小的部件上。对于性能的小改进或一个微小部件出现问题都将对整个系统产生连锁反应。
这篇文章我们从设计理念上综述了系统的关联性,设计的出发点是如何让各个子系统有效的配合发挥最大的性能。下篇文章,我们将介绍ROV设计需要考虑的主要因素,尽情期待!
本文转自国际海洋技术协会ROV委员会


扫一扫即可联系
北京汇海为水下安全保驾护航——水下定位、检测、维修、维护、救助打捞、3D建模





评论