
近期,由西北工业大学牵头的“自主变形仿生柔体潜水器研制”项目,顺利通过了科技部国家重点研发计划“深海关键技术与装备”重点专项综合绩效评价验收。

由西北工业大学航海学院自主研发的3米翼展仿蝠鲼柔体潜水器,在我国西沙北礁海域成功完成1025米大深度滑翔与扑翼一体推进海试,成为全球首例完成此举的具有应用能力的仿生水下航行器,未来将在海洋环境保护等方面发挥重要作用。
长期以来,为了更好地进行海洋数据采集、海洋资源利用,更好地保障海洋权益,世界各国都在高端水下航行器方面开展了尖端科技研究。当前,各国已经投入使用的自主水下航行器中,存在难以同时兼顾工作时长与机动性、隐蔽性差、对海洋生态扰动大等短板,这些短板限制了水下航行器的大规模深入化的应用。
在加快建设海洋强国的大背景下,自2016年来,西北工业大学自主水下航行器团队瞄准未来海洋开发需求,致力于解决限制水下航行器有效利用的卡脖子难题,先后自主研发了4型仿生水下航行器工程样机,并成功开展了水池试验、湖试、海试。

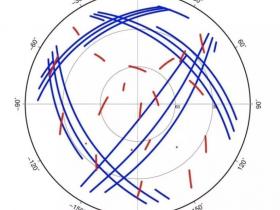
近期海试成功的Ⅳ型样机,翼展3米、重470公斤,具备滑扑一体混合推进能力,它既能在水中高效长距离“滑翔”,也能超高机动“扑动”,融刚性“躯干”与柔性“双翼”于一身,无论是外形还是动作,都和真正的蝠鲼高度相似。项目负责人潘光教授介绍:“它和蝠鲼的滑翔和拍动相似程度已经接近了90%以上。”该型样机已经完成了1025米大深度的滑扑航行试验,并采集温盐深水文信息,取得重大科研突破。
西工大这支团队从基础研究到工程应用,走过了全链条的自主研发之路——突破了蝠鲼生物的仿生运动数据分析、流体力学机理研究、多自由度刚柔并济仿生扑翼结构设计、模拟生物神经仿生控制等多项核心尖端技术。

这款工作时间长、机动性高、载荷量大、隐蔽性强、生物亲和性好的仿蝠鲼潜水器,满足广域粗维度+原位细维度监测需求,可应用于各种水下环境监测、海洋大数据采集、海洋牧场养殖等场景。
潘光介绍,这款仿生水下航行器可以在海洋牧场当中和鱼群混游,监视海洋牧场鱼群健康状态,此外,还可以进一步增加它的声学、磁学传感等载荷,针对未来海洋环境保护,开发起应用价值。
目前,团队已经开始和相关单位合作,对西沙北礁珊瑚开展了环境监测,并采集了周围1000米深度海域温度、盐度、深度等水文信息。
来源: 中国日报网陕西频道










评论