
主要服务内容:
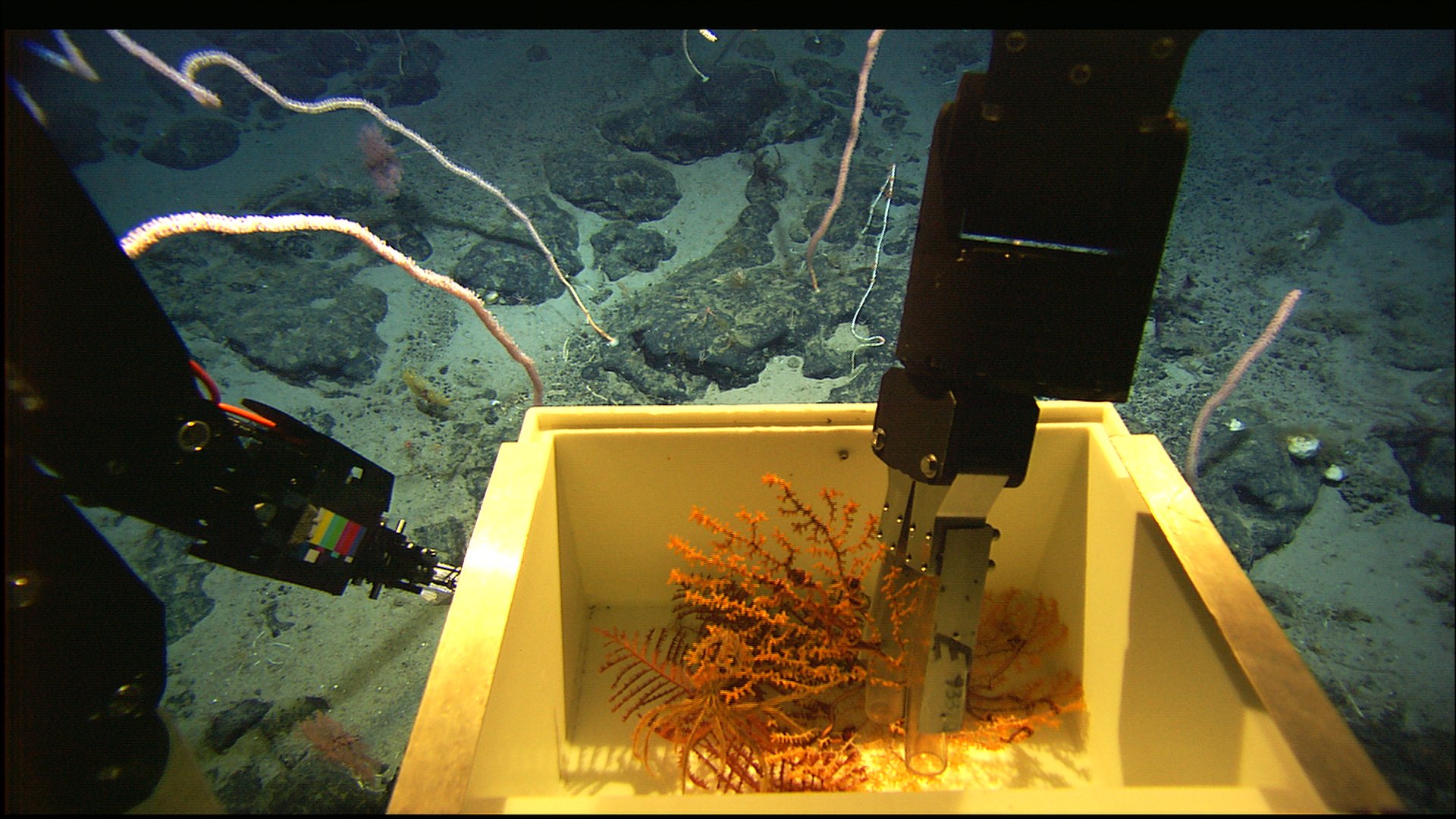
- 海底生物取样
- 海生物栖息地观测
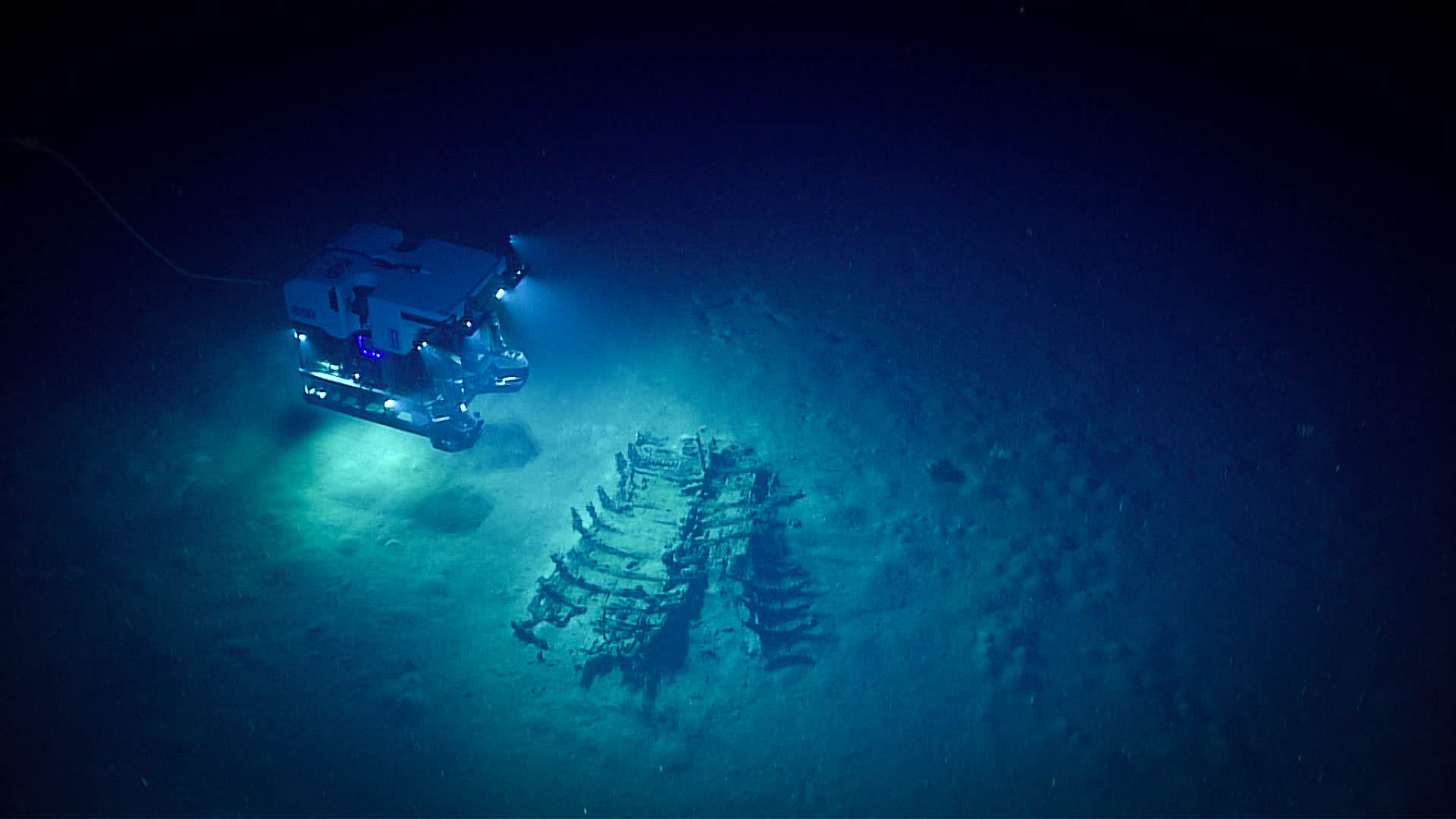
- 海底观测站接头插拔
- 海底考古3D建模
- 设备测试
为水下安全保驾护航
主要服务内容:
 水下机器人技术资料
水下机器人技术资料
水下机器人技术资料
水下机器人技术资料
水下机器人技术资料
水下机器人技术资料
应用案例
近景摄影测量
近景摄影测量
国内新闻
国内新闻
国际新闻
水下机器人技术资料
水下机器人技术资料
水下机器人技术资料
水下机器人技术资料
水下机器人技术资料
水下机器人技术资料
应用案例
近景摄影测量
近景摄影测量
国内新闻
国内新闻
国际新闻
